Point-to-point Communication
The point-to-point communication is the most original form of communication in MPI. It’s when process A wants to send a message to process B. So what is a message?
Definition
In MPI, a message is message data + message envelope.
Definition
The message data is made of three components: (address, count, datatype).
address: the beginning address of the data buffer.
count: the number of successive entries of the type specified by datatype.
datatype: the MPI datatype of the data.
Definition
The message envelope is made of four components: (source, destination, tag, communicator).
source: the rank of the sending MPI process.
destination: the rank of the receiving MPI process.
tag: a message identifier.
communicator: the communicator over which the message is sent.
Remark
1. The datatype is a predefined name to specify machine-independent data elements. The basic datatypes are MPI_INT, MPI_DOUBLE (in C); MPI_INTEGER, MPI_REAL (in Fortran). MPI always provides derived datatypes which are user-defined mix of basic datatypes. The rational for MPI datatype is to support communications between machines with different memory representations.
The tag is a message identifier that allows the receiver to distinguish between different messages from the same source.
The communicator specifies a ‘communication universe’. Messages are always received within the ‘communication universe’ they were sent, and messages sent in different ‘communication universe’ do not interfere. For example, MPI_COMM_WORLD is a specifies the communication within all processes available at initialization time.
In our model problem, we need to send the nodal values of the second bottom row to the neighbouring processor’s top boundary row; as shown in the figure below:
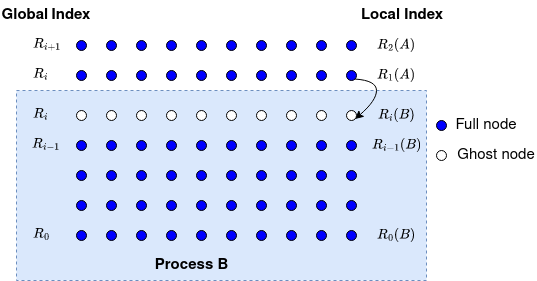
Processor A updates its row $R_i$ to processor B’s row $R_i$. This can be done by MPI_Send
MPI_Send(submesh[1], mesh_size, MPI_DOUBLE, lower, lowertag, MPI_COMM_WORLD);
In this line of code, the data buffer starts at submesh[1], the number of elements is mesh_size, the datatype is MPI_DOUBLE, the destination is lower, the tag is lowertag, and the communicator is MPI_COMM_WORLD.
Topic 2A: Blocking Communication
We have shown how a message is sent through MPI_Send. The block SEND-RECV is the basic MPI communication mechanism. Recall the blocking operation has all four stages packed into a single procedure.
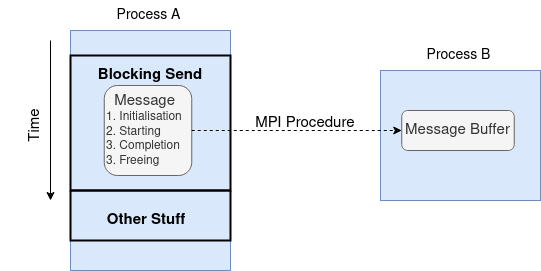
This diagram implies that the corresponding MPI procedure does not return until the message data and envelope have been safely stored away so that the sender is free to modify the sender buffer.
Remark
For the blocking send operation, the message might be sent directly into the matching receiver’s buffer or it might be copied into a temporary system buffer. MPI offers the following communication modes for users to choose how they want to complete the blocking send operation.
Standard Send
Buffered Send
Synchronous Send
Ready Send
Why there four different modes for the blocking send operation? The reason is that the different modes offer different trade-offs between the cost of buffering and the cost of communication. The cost of buffering is the cost of allocating memory for buffering, the cost of communication is due to the latency of the communication, as shown in the figure below.
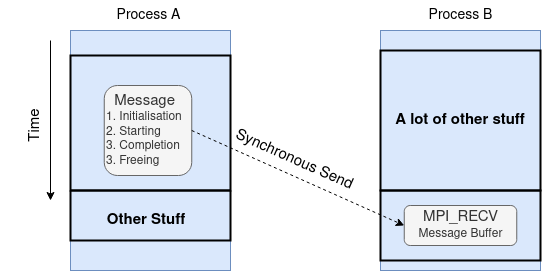
In this diagram, the synchronous send is used to send message from Process A to Process B. However, Process B has a lot of other stuff to do before it can be ready to receive the message. The synchronous send will block Process A not only until Process B is ready to receive the message but the message is posted.
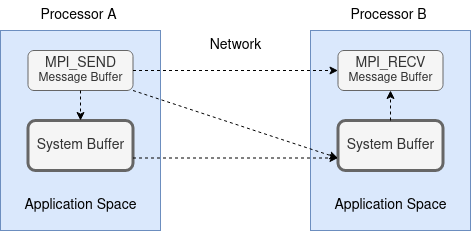
`MPI_SEND`(Standard mode) The standard mode of MPI blocking send operation is the widely used MPI_SEND. This mode will either buffer the outgoing data or sends to the matching receiver’s buffer - up to the particular MPI implementation to decide. In the diagram below, we use the dash line to indicate the possible route for sending the data in this mode.
Key MPI call
- MPI_SEND(buf, count, datatype, dest, tag, comm)
IN buf: starting address of buffer (choice)
IN count: number of entries in buffer (non-negative integer)
IN datatype: datatype of elements in send buffer (handle)
IN dest: rank of destination (integer)
IN tag: message tag (integer)
IN comm: communicator (handle)
C Binding:
// bug message is sent from the calling rank to dest rank
int MPI_Send(const void *buf, int count, MPI_Datatype datatype, int dest, int tag, MPI_Comm comm);
Key Points
Blocking operations implies that neither the send buffer nor the argument list can be modified until the buffer is safely stored away.
System buffer may be outside the application space.
How system buffer is chosen is up to particular MPI implementations.
Eager protocol - small messages
Rendezvous protocol - large messages
It may complete before the matching RECV is posted.
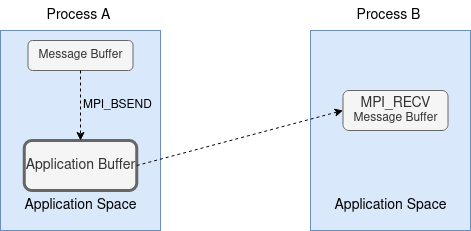
`MPI_BSEND`(Buffered mode)
The buffer mode buffers the message to the application buffer provided by the user.
Key MPI call
Users are responsible for providing enough space for buffer.
The buffer is allowcated by MPI_Buffer_attach and deallocated by MPI_Buffer_detach.
Only one buffer is allowed in a process at a time.
The implementation varies.
The buffer management makes it error-prone.
Key MPI call :class: hint
- MPI_BSEND(buf, count, datatype, dest, tag, comm)
IN buf: starting address of buffer (choice)
IN count: number of entries in buffer (non-negative integer)
IN datatype: datatype of elements in send buffer (handle)
IN dest: rank of destination (integer)
IN tag: message tag (integer)
IN comm: communicator (handle)
// bug message is sent from the calling rank to dest rank
int MPI_Bsend(const void *buf, int count, MPI_Datatype datatype, int dest, int tag, MPI_Comm comm);
`MPI_SSEND`(Synchronous mode)
The synchronous mode completes only if a matching receive is posted, and the receiver has started to receive the message date.
Key MPI call
It implies that the sender has to hold until a matching receive is posted, and the receiver has started to receive the message before continuing.
It also ensures both processes have reached a certain point in the execution.
A standard send can be implemented as a synchronous send.
The MPI_SSEND syntax is the same as MPI_SEND.
The read mode MPI_RSEND is not discussed here. It is rarely used in practice.
The subtle difference between the different modes can be seen in the figure below.
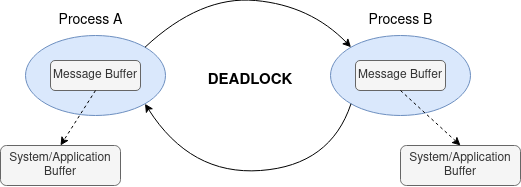
In this diagram, the message sent by each process has to be copied out before the send operation returns and the receive operation starts. For the program to complete, it is necessary for at least one of the two messages sent be buffered. Thus, this program can succeed only if the communication system can buffer the message data. Otherwise, the program will deadlock.
`MPI_RECV` Next we will talk about the blocking receive operation. In MPI, SEND and RECV are asymmetric operations. The sender initiates the communication, and the receiver waits for the message to arrive. A receiver may accept messages from an arbitrary sender, but the sender must specify a unique reciver. The length of the RECV buffer can also be equal to or greater than the length of the SEND message. Finally, unlike the different modes of blocking send operation, there is only one RECV procedure but it mathces all of the send modes.
Key MPI call
- MPI_RECV(buf, count, datatype, source, tag, comm, status)
IN buf: starting address of buffer (choice)
IN count: number of entries in buffer (non-negative integer)
IN datatype: datatype of elements in send buffer (handle)
IN source: rank of source or MPI_ANY_SOURCE (integer)
IN tag: message tag or MPI_ANY_TAG (integer)
IN comm: communicator (handle)
OUT status status object (status)
// bug message is received at the calling rank
int MPI_Recv(void *buf, int count, MPI_Datatype datatype, int source, int tag, MPI_Comm comm, MPI_Status *status);
Note
The MPI_Status object is used to store information about the received message, such as the source, tag, and number of elements received. It is optional to use the MPI_Status object, but it is useful for debugging and error checking. In C, the MPI_Status object is a structure that contains the following fields: MPI_SOURCE, MPI_TAG, MPI_ERROR, and in Fortran, it is an array of integers.
Model Problem Now we apply the SEND and RECV operations to our model problems. Focusing on each process, we can see that the process sends the second top and second bottom rows to the neighbouring processes, and receives updates on the top and bottom rows from the neighbouring processes; as shown in the figure below:
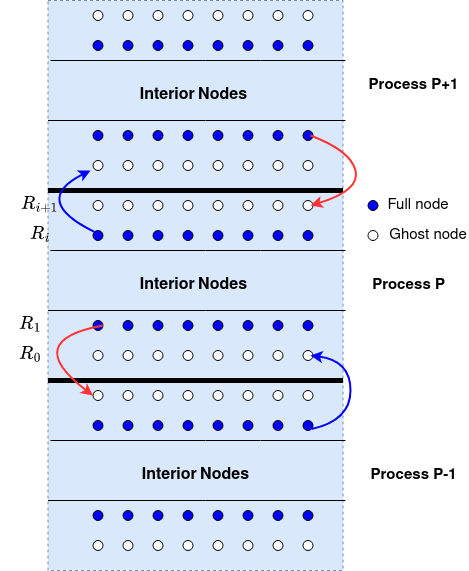
In this diagram, each process sends two outgoing messages and receives tow incoming messages. To distinguish them, we use different upper tag and lower tag for the messages.
Exercise
In laplace_mpi_blocking.c, complete the communication by writing blocking SEND and RECE using MPI_SEND and MPR_RECV.
Topic 2D: Nonblocking Communication
Since the network speed is much slower than floating-point operations, time spent on waiting for completing the matching SEND and RECV in blocking operations can be used for computation. This is realised by nonblocking operations. Recall the nonblocking opeaxrtion packs initialisation and starting stages into one MPI procedure and completion and freeing stages into a separate procedure, as shown in the following diagram:
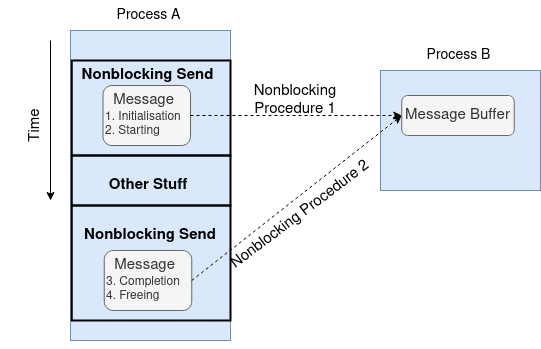
This allows the sender to continue computation just after handing over the control of data buffer. The first nonblocking SEND procedure is MPI_ISEND.
Key MPI call :class: hint
- MPI_ISEND(buf, count, datatype, dest, tag, comm, request)
IN buf: starting address of buffer (choice)
IN count: number of entries in buffer (non-negative integer)
IN datatype: datatype of elements in send buffer (handle)
IN dest: rank of destination (integer)
IN tag: message tag or MPI_ANY_TAG (integer)
IN comm: communicator (handle)
OUT request: communication request (handle)
//buffer msg is sent from the calling rank to dest rank
int MPI_Isend(const void *buf, int count, MPI_Datatype datatype, int dest, int tag, MPI_Comm comm, MPI_Request *request);
The nonblocking SEND operation has the same communication modes as the blocking SEND operation, i.e., MPI_Isend, MPI_IBSEND, MPI_ISSEND, and MPI_IRSEND. We will not discuss them here.
All arguments are the same as in MPI_SEND except the additional request argument in the nonblocking SEND operation. The request is an opaque object used to identify communication operations and match the operation that initiates the communication with the operation that completes it. In other words, the request is used to track the progress of the communication operation and is used in the second nonblocking procedure to complete the communication.
The second nonblocking procedure is usually realised by MPI_WAIT.
Key MPI call
- MPI_WAIT(request, status)
INOUT request: communication request (handle)
OUT status: status object (status)
// wait for the completion of a nonblocking operation
int MPI_Wait(MPI_Request *request, MPI_Status *status);
In our code, we will also use MPI_Waitall to wait for both top row and bottom row nonblocking communications to complete.
Key MPI call
- MPI_WAITALL(count, array_of_requests, array_of_statuses)
IN count: list length (non-negative integer)
INOUT array_of_requests: array of requests (array of handles)
OUT array_of_statuses: array of status objects (array of status)
// wait for all nonblocking operations to complete
int MPI_Waitall(int count, MPI_Request array_of_requests[], MPI_Status array_of_statuses[]);
However, we may want to just check if a communication operation is completed rather than waiting for it to complete. MPI_TEST is used for this purpose.
Key MPI call
- MPI_TEST(request, flag, status)
INOUT request: communication request (handle)
OUT flag: true if the operation is complete, false otherwise (logical)
OUT status: status object (status)
// test for the completion of a nonblocking operation
int MPI_Test(MPI_Request *request, int *flag, MPI_Status *status);
Similarly, it can test multiple communication request at once by MPI_Testall.
Key MPI call
- MPI_TESTALL(count, array_of_requests, flag, array_of_statuses)
IN count: list length (non-negative integer)
INOUT array_of_requests: array of requests (array of handles)
OUT flag: true if all operations are complete(logical)
OUT array_of_statuses: array of status objects (array of status)
// test for the completion of all nonblocking operations
int MPI_Testall(int count, MPI_Request array_of_requests[], int *flag, MPI_Status array_of_statuses[]);
The nonblocking RECV operation is similar to the nonblocking SEND operation. Like its blocking counterpart, there is only one nonblocking RECV operation, MPI_IRECV.
Key MPI call
- MPI_IRECV(buf, count, datatype, source, tag, comm, request)
OUT buf: starting address of buffer (choice)
IN count: number of entries in buffer (non-negative integer)
IN datatype: datatype of elements in send buffer (handle)
IN source: rank of source or MPI_ANY_SOURCE (integer)
IN tag: message tag or MPI_ANY_TAG (integer)
IN comm: communicator (handle)
OUT request: communication request (handle)
// buffer msg is received at the calling rank
int MPI_Irecv(void *buf, int count, MPI_Datatype datatype, int source, int tag, MPI_Comm comm, MPI_Request *request);
To complete the nonblocking RECV operation, we use MPI_WAIT or MPI_WAITALL as we did for the nonblocking SEND operation.
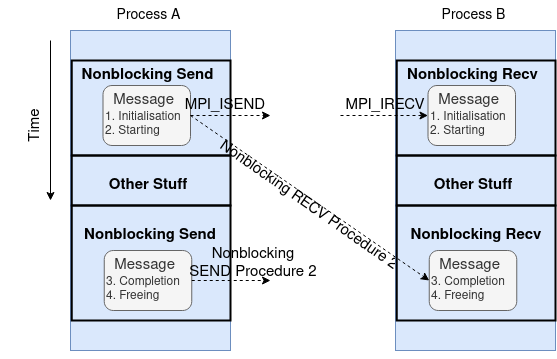
In this diagram, the nonblocking RECV operation may be posted before the matching SEND operation is initiated. Also, its completion does not indicate that the matching SEND operation has completed.
Example
For example, in our model problem, each process sends two outgoing messages and receives two incoming messages. How should we use nonblocking SEND and RECV operations to complete the communication? There are a few ways to do this. The most straightforward way is to use MPI_Waitall to wait for all nonblocking operations to complete. However, this introduces unnecessary waiting time for the process. Remember that the Jacobi solver is local, meaning the top and bottom rows are updated independently of each other. Therefore, we can use MPI_WAITALL to wait for the top row communication and the bottom row communication to complete separately. Moreover, we can use MPI_TESTALL to check if the top row communication and the bottom row communication are completed. If they are, we can continue with the computation. This way, we can overlap communication and computation, reducing the total execution time of the program.
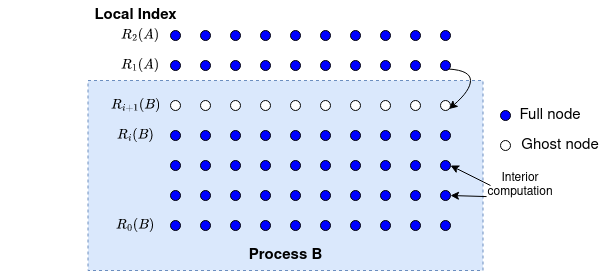
In this diagram, it shows that the local Jacobi method can operate on the top row of process B as soon as it has received the top row from process A. Observing the communication pattern, we can write the following code to overlap communication and computation:
/* Initiate sending the top and bottom row of full nodes*/
MPI_Isend(submesh[1], mesh_size, MPI_DOUBLE, lower, lowertag,\
MPI_COMM_WORLD, &bottom_bnd_requests[1]);
MPI_Isend(submesh[*ptr_rows-2], mesh_size, MPI_DOUBLE, upper, uppertag, \
MPI_COMM_WORLD, &top_bnd_requests[1]);
/* Jacobi method iterates on the interior full nodes */
Jacobi_int(ptr_rows, mesh_size, &submesh[0][0], &submesh_new[0][0], \
&subrhs[0][0], space);
/* Test the top and bottom row of ghost nodes */
MPI_Testall(2, top_bnd_requests, &top_flag, top_bnd_status);
MPI_Testall(2, bottom_bnd_requests, &bottom_flag, bottom_bnd_status;
/* Jacobi method iterates on top or bottom row of full nodes based \
on the testing results */
Exercise
Rewrite the nonblocking communication in laplace_mpi_nonblocking.c such that the process waits until the completion of both top and bottom rows.
In the next section, we will introduce persistent communication.
Persistent Communication
We have discussed the blocking and nonblocking communication operations. The last part of point-to-point communication that we want to study is the persistent communication.
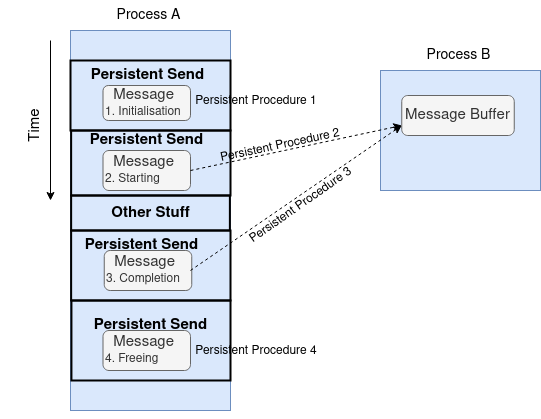
Recall that the a blocking operation has all four stages packed into a single procedure, and a nonblocking operation packs the initialisation and starting stages into one MPI procedure and the completion and freeing stages into a separate procedure. Following the same semantics, a persistent operation has a single procedure for each of the four stages of the operation.
Often a communication with the same argument list is repeated executed within the inner loop of a parallel program. In such a situation, it may be possible to optimize the communication by binding the list of communication arguments to a persistent communication request once and then repeatedly using the request to start and complete operations.
Let’s take a look at the four procedures of a persistent operation.
Persistent Send Procedure 1
Key MPI call
- MPI_SEND_INIT(buf, count, datatype, dest, tag, comm, request)
IN buf: starting address of buffer (choice)
IN count: number of entries in buffer (non-negative integer)
IN datatype: datatype of elements in send buffer (handle)
IN dest: rank of destination (integer)
IN tag: message tag or MPI_ANY_TAG (integer)
IN comm: communicator (handle)
OUT request: communication request (handle)
This procedure creates a persistent communication request for a RECV operation. At the creation, the request is inactive.
Persistent Send Procedure 2
Next, the request is started by the following procedure MPI_START.
Key MPI call
- MPI_START(request)
IN request: communication request (handle)
// start a persistent communication
int MPI_Start(MPI_Request *request);
A call to MPI_START makes the request active, and the communication is initiated. It has the same manner as a call to MPI_ISEND.
Persistent Send Procedure 3 This procedure completes the communication. It uses MPI_WAIT as in nonblocking operations.
Persistent Send Procedure 4 Finally, the request is freed by the following procedure MPI_REQUEST_FREE.
Key MPI call
- MPI_REQUEST_FREE(request)
INOUT request: communication request (handle)
// free a persistent communication request
int MPI_Request_free(MPI_Request *request);
The following diagram shows the four procedures of a persistent operation.
Note
There is no persistent RECV operation in MPI as MPI uses push mechanism for communication.
Now, we may also rewrite the overlapping communication and computation in the persistent communication mode.
/* Initialise sending the bottom row of full nodes */
MPI_Send_init(submesh[1], mesh_size, MPI_DOUBLE, lower, lowertag,\
MPI_COMM_WORLD, &bottom_bnd_requests[1]);
for (int iter = 0; iter < 100; iter++){
/* Activate the communication request */
MPI_Startall(2, bottom_bnd_requests);
/* Jacobi method iterates on the interior full nodes */
Jacobi_int(ptr_rows, mesh_size, &submesh[0][0], &submesh_new[0][0], \
&subrhs[0][0], space);
/* Test the top and bottom row of ghost nodes */
MPI_Testall(2, bottom_bnd_requests, &top_flag, bottom_bnd_status);
Jacobi_bottom(ptr_rows, mesh_size, &submesh[0][0], &submesh_new[0][0], &subrhs[0][0], space);
/* Jacobi method iterates on bottom row of full nodes based \
on the testing results */
MPI_Waitall(2, bottom_bnd_requests, bottom_bnd_status);
}
/* Free the request handle */
MPI_Request_free(bottom_bnd_request);